
Что такое коэффициент режима работы несущего винта
Опубликовано: 03.10.2024
3. УГОЛ АТАКИ НЕСУЩЕГО ВИНТА
Соответственно принятому в аэродинамике несущего винта разделению понятий аэродинамических поверхностей — лопасти винта и поверхности, ометаемой винтом при его вращении — необходимо разграничить понятие угла атаки сечения лопасти и угла атаки всего несущего винта.
Рис. 48. Угол атаки несущего винта
Угол атаки несущего винта (обозначается заглавной буквой А 1 ) — угол между направлением воздушного потока (противоположным направлению полета) и плоскостью вращения втулки несущего винта. Этот угол может иметь любое значение (от —180° до +180°) в зависимости от направления полета.
Если воздушный поток подходит к плоскости вращения винта снизу (автожирный режим), то угол атаки несущего винта считается положительным. Если воздушный поток набегает на несущий винт сверху, то угол атаки принимается отрицательным.
4. ПАРАМЕТРЫ, ОПРЕДЕЛЯЮЩИЕ ХАРАКТЕРИСТИКИ НЕСУЩЕГО
Сравнительной характеристикой качества несущих винтов при различных их конструктивных параметрах будет являться, в конечном счете, величина тяги винта, создаваемой при затрате одной и
1 Обозначение буквой А принято автором.
данного винта; последние пять зависят от режима полета вертолета и от атмосферных условий.
Рассмотрим кратко перечисленные параметры. Профиль лопасти. При выборе профиля лопасти конструкторы стремятся к тому, чтобы он обладал: наибольшим качеством (отношением коэффициента подъемной силы с у к коэффициенту сопротивления с л ), наименьшим изменением положения центра давления на профиле с изменением угла атаки сечений лопасти, т. е. по возможности наименьшим изменением момента аэродинамических сил (с м ), способностью самовращаться (авторотировать) в большом диапазоне углов атаки лопасти в полете с неработающим двигателем и возможностью простого конструктивного и технологического выполнения лопасти.
С целью получения наилучшего качества винта нередко лопасть проектируют с переменным по размаху профилем. Для лопастей несущих винтов современных вертолетов применяются профили крыльев самолета.
Рассматривая лопасть так же, как крыло самолета, для про филя ее сечения можно построить поляры (рис. 49) с учетом индуктивного скоса потока и без скоса потока (крыло с бесконечным удлинением).
Коэффициент лобового сопротивления с х лопасти конечного размаха может быть представлен как сумма коэффициентов профильного и индуктивного сопротивлений, т. е.
С х = С хи + C хр
Из рис. 49 видно, что с увеличением угла атаки сечения лопасти несколько увеличивается профильное сопротивление с хр и значительно увеличивается индуктивное сопротивление с хи .
Профильное сопротивление с хр в большой степени зависит от . формы профиля, от того, насколько этот профиль искажается деформациями обшивки, а также от шероховатости поверхности лопасти. Лопасть с металлической обшивкой, сохраняющей при работе форму профиля, и с хорошей отделкой ее поверхности имеет меньшее профильное сопротивление, чем лопасть с полотняной или фанерной обшивкой.
В случае плохой, шероховатой поверхности лопасти срыв потока с нее наступает раньше (рис. 50).
Нагрузка на ометаемую площадь. Нагрузка р на 1 м 2 ометаемой площади является одним из наиболее важных параметров, определяющих летные свойства вертолета.
где G — полетный вес вертолета;
F — площадь, ометаемая винтом при его вращении.
При проектировании вертолета конструкторам приходится выбирать величину нагрузки с таким расчетом, чтобы она наиболее удачно удовлетворяла как режиму максимальной скорости, так и режимам висения и полета при самовращении несущего винта.
Для современных вертолетов величина р имеет значение 20 -- 25 кг/м 2 .
Коэффициентом заполнения поверхности, ометаемой несущим винтом при его вращении, называется отношение площади всех лопастей к площади этой поверхности.
где z—число лопастей;
Fлоп — площадь лопасти;
F —площадь, ометаемая несущим винтом при его вращении.
Рис. 51. Сужение лопасти
лопасти или числа лопастей также невыгодно, так как это снижает к. п. д. несущего винта. Количество лопастей несущего винта. Наиболее выгодными несущими винтами, удовлетворяющими требованиям уравновешенности и обладающими достаточно хорошим коэффициентом полезного действия, являются трехлопастные и четырехлопастные воздушные винты. Уменьшение числа лопастей приводит к неуравновешенности винта и вследствие этого к вибрациям конструкции вертолета.
Форма лопасти в плане. Наиболее распространены лопасти трапецевидной формы с сужением ее к концу. Такая форма лопасти является наиболее выгодной. Хорда ее у комля примерно в 2— 3 раза больше хорды на конце (рис. 51). Однако существуют вертолеты, которые имеют прямоугольную форму лопасти в плане.
Влияние формы лопасти на величину тяги сравнительно с влиянием других параметров невелико.
Геометрическая крутка лопасти. Обычно лопасти несущих винтов вертолетов имеют отрицательную линейную крутку, так что у комля они работают на больших углах атаки (рис. 52). Это дает более равномерное распределение аэродинамических сил вдоль лопасти и уменьшает индуктивные потери несущего винта, вызываемые неравномерно-
стью распределения по
тока,
Массовая характеристика у представляет собой соотношение между массовыми и аэродинамическими силами (рис.54).
b— величина хорды лопасти на 0,7 R;
J rm — момент инерции лопасти относительно горизонтального
R— радиус несущего винта.
Для лопастей несущих винтов современных вертолетов у = = 4 -- 8. Тяжелые лопасти имеют меньшую величину, легкие лопасти — большую.
В отличие от статического момента, равного произведению массы m на плечо r, момент инерции лопасти представляет собой сумму произведений масс отдельных ее элементов на их плечи относительно горизонтального шарнира во второй степени r 2 , вычисленных по всей длине лопасти.
Если момент инерции отдельного элемента (J э ) равен
то момент инерции всей лопасти относительно горизонтального шарнира соответственно выразится формулой
Рис. 54. Статический момент элемента лопасти
На рис. 18 были схематически показаны силы, действующие на лопасть при вращении ее в косом потоке, когда она совершает маховые движения. Там условно все силы приложены к одной точке (к центру тяжести лопасти). На самом деле эти силы, представляющие собой равнодействующие от элементарных сил по всей длине лопасти, приложены в разных точках, имеющих различные плечи относительно оси вращения.
Из этого рисунка видно, что три силы из четырех прямо зависят от массы (или веса) лопасти. Чем больше вес лопасти, тем больше величина центробежной силы, которая стремится уменьшить угол взмаха лопасти и распрямить коническую поверхность вращения несущего винта.
Чем тяжелее лопасть, тем меньше амплитуда маховых движений, меньше завал конуса вращения назад и вбок, а следовательно, меньше величины продольного и поперечного наклона оси несущего винта. И, наконец, чем больше вес лопасти, тем большей инерцией вращения обладает винт и тем больше запас времени для осуществления перехода на режим самовращения при отказе двигателя.
Однако увеличение веса лопастей ставит более высокие требования к прочности винта и всей конструкции вертолета, утяжеляет управление и уменьшает его весовую отдачу.
Жесткость конструкции лопасти. В полете лопасти несущего винта имеют упругие изгибные и крутильные деформации, что предъявляет большие требования к их прочности вообще и особенно к динамической (усталостной) прочности. Эти деформации, кроме того, несколько изменяют аэродинамику лопасти, изменяя ее истинные углы атаки и углы взмаха. Поэтому вполне естественно, что лопасти различной жесткости оказывают различное влияние на условия работы несущего винта. Слишком упругие лопасти не могут обеспечить достаточную жесткость, так как они весьма чувствительны к случайным возмущениям потока и снижают эффективность управления несущим винтом. Чрезмерно жесткие лопасти имеют большой вес, неспособны поглощать неравномерность действия на них аэродинамических и массовых сил и вследствие этого невыгодны с точки зрения вибраций.
Концевые и комлевые потери ометаемой площади несущего
винта. В работе несущего винта не вся ометаемая площадь достаточно эффективно участвует в создании тяги.
По концам лопастей в силу перетекания воздуха снизу вверх из зоны повышенного давления в зону разрежения внешняя часть поверхности, ометаемой винтом при его вращении, образующая
узкое кольцо, из расчета эффективной площади несущего винта должна быть исключена (рис. 55).
Комлевая часть лопасти, представляющая собой узлы крепления и шарниры ее подвески, а также втулка несущего винта в создании тяги не участвуют. В поступательном полете при косой обдувке винта в центральной части поверхности, ометаемой винтом при вращении, некоторая часть лопасти в азимутах от 180 до ЗбО 9 обдувается с хвостика профиля и не создает подъемной силы. Следовательно, центральная часть площади несущего винта также должна быть исключена при подсчете эффективной площади.
Таким образом, в создании тяги участвует не вся площадь диска, а несколько меньшая, которая называется эффективной площадью и подсчитывается по формуле
В — коэффициент потерь концевой площади.
Эффективная площадь составляет примерно 0,9—0,92 от всей площади, ометаемой несущим винтом при его вращении.
Аэродинамические характеристики фюзеляжа и влияние его на несущий винт. Сопротивление фюзеляжа в полете вертолета по сравнению с полной аэродинамической силой несущего винта невелико. В среднем на малых скоростях оно составляет 3—5% от тяги винта.
Однако, когда скорость полета приближается к максимальной, вредное сопротивление (сопротивление фюзеляжа, шасси и других ненесущих частей) начинает играть существенную роль. Рост сопротивления с увеличением скорости усугубляется тем, что фюзеляж вертолета, наклоняясь вперед и разворачиваясь в сторону, увеличивает свой “лоб”, т. е. фронтальное сечение, перпендикулярное встречному потоку (рис. 56).
Аэродинамические формы фюзеляжа оказывают существенное влияние на работу несущего винта.
Воздушный поток, отбрасываемый несущим винтом, наталкивается на фюзеляж и хвостовую балку, в результате чего частично изменяет свое направление, подвергаясь определенным возмущениям. При этом отдельные струи потока образуют вихри, действие которых сообщается соседним слоям воздушного потока и передается той его зоне, которая непосредственно взаимодействует с лопастями винта (рис. 57).
Если площади фюзеляжа и балки, Лежащих на пути этого потока, невелики, а формы их хорошо обтекаемы, то влияние их на работу винта незначительно. Если же аэродинамические формы вертолета не “облагорожены”, фюзеляж и другие элементы конструкции расположены очень близко к винту и имеют большую площадь, то это будет понижать к. п. д. винта, служить причиной вибраций вертолета и усложнять управление им.
Существенное значение имеет положение центра давления аэродинамических сил фюзеляжа и изменение его с изменением режима полета. Если линия действия равнодействующей аэродинамических сил фюзеляжа проходит далеко от центра тяжести и если расстояние до нее от Ц. Т. сильно изменяется с изменением режима полета, то управлять вертолетом становится труднее, особенно на переходных режимах.
Рис. 57. Влияние фюзеляжа на воздушный поток от несущего винта Рис. 58. Потребные величины общего шага для полета на различных скоростях и оборотах несущего винта
Системы управления современных вертолетов позволяют совершать полет при различных значениях общего шага, изменяемого в некотором небольшом диапазоне. При этом изменение общего шага вызывает и изменение числа оборотов несущего винта п (рис. 58).
Большое значение угла установки (шага) лопастей невыгодно из-за срыва потока. При малом же значении угла установки лопастей происходит раскрутка оборотов винта, увеличивается центробежная сила, чрезмерно нагружается конструкция винта и понижается к. п. д. несущего винта.
Число оборотов несущего винта. Увеличение числа оборотов несущего винта, выгодное с точки зрения получения больших скоростей полета, ограничивается влиянием сжимаемости воздуха при скорости на конце наступающей лопасти, близкой к скорости звука.
Испытания в аэродинамических трубах показали, что влияние сжимаемости воздуха сказывается на характеристике профиля лопасти при скоростях, равных 70—80% скорости звука. При этом центр давления на сечении лопасти смещается к задней кромке.
При вертикальном полете (вертикальный подъем или вертикальное снижение) и при висении встречный поток направлен по оси винта. В горизонтальном же полете или в любом наклонном полете наблюдается косая обдувка винта. При этом воздушный поток можно разложить на два составляющих потока: направленный по оси винта и в плоскости вращения (рис.59).
Если скорость встречного потока V, то скорость осевого составляющего потока будет равна V sin А а скорость пото-
ка в плоскости вращения V cos A. Рис. 59. Разложение вектора скорости полета на две составляющие
Отношение скорости потока, лежащего в плоскости вращения, к окружной скорости конца лопасти называется коэффициентом, характеризующим режим работы винта:
Для горизонтального полета, когда угол атаки несущего винта сравнительно невелик и косинус его близок к единице, можно без большой ошибки принимать за р отношение скорости полета к окружной скорости конца лопасти, т. е.
Рис. 60. Распределение скоростей обтекания различных сечений лопасти при косой обдувке несущего винта
Рис. 61. Сложение индуктивной скорости и осевой составляющей скорости встречного потока
где и — средняя индуктивная скорость подсасывания воздуха в плоскости вращения винта (рис. 61).
государственный стандарт
союза сср
АППАРАТЫ ВИНТОКРЫЛЫЕ.
МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ
ТЕРМИНЫ, ОПРЕДЕЛЕНИЯ И БУКВЕННЫЕ ОБОЗНАЧЕНИЯ
ГОСТ 22499-77
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СТАНДАРТОВ
СОВЕТА МИНИСТРОВ СССР
Москва
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
АППАРАТЫ ВИНТОКРЫЛЫЕ. МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ
Термины, определения и буквенные обозначения
Rotorcraft. Flight mechanics.
Terms, definitions and letter symbols
ГОСТ
22499-77
Постановлением Государственного комитета стандартов Совета Министров СССР от 29.04.1977 г. № 1108 срок введения установлен
с 01.07.1978 г.
Настоящий стандарт устанавливает применяемые в науке, технике и производстве термины, определения и буквенные обозначения величин основных понятий, относящихся к механике полета в атмосфере винтокрылых аппаратов.
Термины и буквенные обозначения, установленные настоящим стандартом, обязательны для применения в документации всех видов, учебниках, учебных пособиях, технической и справочной литературе.
Приведенные определения можно, при необходимости, изменять по форме изложения, не допуская нарушения границ понятий.
Для каждого понятия установлен один стандартизованный термин. Применение терминов-синонимов стандартизованного термина запрещается.
Для отдельных стандартизованных терминов в стандарте приведены их краткие формы, которые разрешается применять в случаях, исключающих возможность их различного толкования.
В случае, когда существенные признаки понятия содержатся в буквальном значении термина, определение не приведено, и соответственно, в графе «Определение» проставлен прочерк.
В стандарте приведен алфавитный указатель содержащихся в нем терминов на русском языке.
Стандартизованные термины набраны полужирным шрифтом, их краткая форма - светлым.
1. Полусвязанная система координат несущего винта
Прямоугольная система координат, начало Oн которой размещается в точке пересечения оси вращения с плоскостью вращения несущего винта, имеющая нормальную ось ( O нYн), связанную с осью вращения несущего винта, продольную (ОнХн) и поперечную (OнZн) оси, направление которых определяется направлением проекции на плоскость вращения вектора воздушной скорости несущего винта
2. Продольная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная оси вращения несущего винта и имеющая такое же направление, как и проекция на плоскость вращения вектора воздушной скорости несущего винта
Ось, совпадающая с осью вращения несущего винта и направленная в сторону положительного направления силы тяги.
Примечание . За положительное направление силы тяги принимается ее направление на режиме висения винтокрылого аппарата
4. Поперечная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная плоскости, образованной осями ОнХн и OнYн, направленная в сторону наступающей лопасти.
Примечание . Так как ось O нZн направлена в сторону наступающей лопасти, то система полусвязанных осей координат оказывается правой для несущего винта правого вращения и левой для несущего винта левого вращения
Прямая линия, относительно которой происходит изменение углового положения сечений лопасти при воздействии на нее исполнительного устройства системы управления несущего винта.
Примечания: 1. Для несущих винтов, у которых вертикальные шарниры имеют наибольшее удаление от оси вращения несущего винта по сравнению с другими шарнирами, за ось лопасти принимается прямая, относительно которой определяется геометрическая компоновка лопасти;
2. Здесь и далее все элементы конструкции винтокрылых летательных аппаратов принимаются недеформируемыми, за исключением специальных, применяемых на винтах с упругим креплением лопастей
6. Законцовка лопасти несущего винта
Наиболее удаленная от оси вращения часть лопасти несущего винта
7. Концевая точка допасти несущего винта
Точка пересечения оси лопасти несущего винта с плоскостью, касательной к поверхности законцовки лопасти и перпендикулярной к ее оси
Примечание. Для определения плоскости вращения винтов, имеющих конструктивный угол конусности, отличный от нуля, ось лопасти условно поворачивают до положения, перпендикулярного оси вращения винта
Геометрическая ось вала или опоры несущего винта, относительно которой происходит его вращение
Угол между вектором воздушной скорости несущего винта и плоскостью его вращения; положителен, если проекция воздушной скорости на нормальную ось отрицательна
11. Угол взмаха лопасти несущего винта
Угол поворота оси лопасти относительно оси горизонтального шарнира или линии, ей эквивалентной, для упругой заделки лопасти, измеряемый от плоскости вращения несущего винта; положителен при отклонении оси лопасти в направлении положительной силы тяги
12. Угол качания лопасти несущего винта
13. Угол азимутального положения лопасти несущего винта
14. Радиус несущего винта
Радиус наибольшей окружности, лежащей в плоскости вращения несущего винта и образуемой концевой точкой лопасти.
1. За диаметр несущего винта принимается соответственно значение D = 2R.
2. Радиус рулевого винта определяется аналогично и имеет обозначение Rр.в.
3. Значение радиуса несущего винта используется при вычислении относительных линейных значений элементов несущего винта и винтокрылого летательного аппарата
15. Площадь несущего винта
Примечание. Площадь несущего винта используется при вычислении относительных площадей элементов винтокрылого аппарата и различных безразмерных коэффициентов
17. Радиус сечения лопасти несущего винта
Отрезок прямой, лежащий в плоскости, перпендикулярной к оси лопасти, и соединяющий наиболее удаленные точки сечения лопасти этой плоскостью.
Примечание . Для определения хорды произвольного сечения лопасти применяется буквенный или числовой индекс (например, b0,7 - хорда лопасти в сечении на относительном радиусе )
Величина, определяемая соотношением
21. Расстояние от оси вращения несущего винта до оси вертикального шарнира
22. Расстояние между осями горизонтального и вертикального шарниров шарнирного несущего винта
23. Угол установки сечения лопасти несущего винта
24. Угол установки лопасти несущего винта
Угол установки сечения лопасти несущего винта при относительном радиусе
25. Угол крутки сечения лопасти несущего винта
Разность между углом установки сечения лопасти и углом установки лопасти несущего винта
26. Статический момент лопасти несущего винта относительно горизонтального и вертикального шарниров
Статический момент лопасти
Статический момент лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира.
Момент инерции лопасти
Момент инерции массы лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира.
28. Момент инерции несущего винта
Суммарный момент инерции массы лопастей и всех кинематически связанных с ним агрегатов, приведенный к оси вращения несущего винта.
Примечание. Кинематически связанные с несущим винтом агрегаты определяются в каждом конкретном случае
29. Массовая характеристика лопасти несущего винта
Величина, определяемая отношением
где - частная производная коэффициента аэродинамической подъемной силы профиля лопасти по углу атаки;
30. Воздушная скорость несущего винта
Скорость начала Он полусвязанной системы координат относительно невозмущенной среды
31. Угловая скорость вращения несущего винта
Угловая скорость вращения несущего винта вокруг его оси относительно фюзеляжа винтокрылого аппарата
32. Окружная скорость концов лопастей несущего винта
33. Характеристика режима работы несущего винта
Характеристика режима винта
Величина, определяемая соотношением
Примечания к терминам 1 - 33:
1. Определения терминов пп. 1 - 33 применимы и для рулевого винта с обязательным использованием тех же буквенных обозначений с индексом «р», за исключением п. 14.
2. Аналогично образуются термины, определения и буквенные обозначения для несущих винтов многовинтовых винтокрылых аппаратов, но обозначения должны иметь различающиеся для различных винтов индексы.
3. Индексы «н» и «р» могут быть опущены, если это не приведет к смешиванию понятий
34. Аэродинамическая сила несущего винта
Равнодействующая системы аэродинамических сил, действующих на несущий винт
35. Продольная сила несущего винта
Составляющая силы по оси ОнХн полусвязанной системы координат несущего винта, взятая с обратным знаком
Составляющая силы по оси ОнYн полусвязанной системы координат несущего винта
Составляющая силы по оси OнZн полусвязанной системы координат несущего винта
Момент системы сил, образующих аэродинамическую силу , относительно точки пересечения плоскости вращения несущего винта с осью его вращения
39. Поперечный момент несущего винта
Составляющая момента Мн по оси ОнХн полусвязанной системы координат несущего винта
Составляющая аэродинамического момента Мн по оси ОнYн полусвязанной системы координат несущего винта
41. Продольный момент несущего винта
Составляющая аэродинамического момента Мн по оси ОнZн полусвязанной системы координат несущего винта
42. Крутящий момент несущего винта
Составляющая аэродинамического момента Мн по оси ОнYн полусвязанной системы координат несущего винта, взятая с обратным знаком
Отношение составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамической силы по осям связанной и скоростной систем координат, определяемые отношением силы к произведению , имеют аналогичные принятым в ГОСТ 20058-74 обозначения со специальными индексами, например, т.п.
44. Коэффициенты составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат
Отношение составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамического момента по осям связанной и скоростной систем координат, определяемые отношением момента к произведению , имеют аналогичные принятым в ГОСТ 20058-74 обозначения со специальными индексами. Например, , и т.п.
АЛФАВИТНЫЙ УКАЗАТЕЛЬ ТЕРМИНОВ
Законцовка лопасти несущего винта
Коэффициент заполнения несущего винта
Коэффициенты составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат
Коэффициенты составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат
Момент инерции несущего винта
Момент инерции лопасти
Момент инерции лопасти несущего винта относительно горизонтального и вертикального шарниров
Момент лопасти несущего винта относительно горизонтального и вертикального шарниров статический
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
АППАРАТЫ ВИНТОКРЫЛЫЕ. МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ
Термины, определения и буквенные обозначения
Rotorcraft. Flight mechanics.
Terms, definitions and letter symbols
Дата введения 1978-07-01
Постановлением Государственного комитета стандартов Совета Министров СССР от 29.04.1977 г. N 1108 срок введения установлен с 01.07.1978 г.
Настоящий стандарт устанавливает применяемые в науке, технике и производстве термины, определения и буквенные обозначения величин основных понятий, относящихся к механике полета в атмосфере винтокрылых аппаратов.
Термины и буквенные обозначения, установленные настоящим стандартом, обязательны для применения в документации всех видов, учебниках, учебных пособиях, технической и справочной литературе.
Приведенные определения можно, при необходимости, изменять по форме изложения, не допуская нарушения границ понятий.
Для каждого понятия установлен один стандартизованный термин. Применение терминов-синонимов стандартизованного термина запрещается.
Для отдельных стандартизованных терминов в стандарте приведены их краткие формы, которые разрешается применять в случаях, исключающих возможность их различного толкования.
В случае, когда существенные признаки понятия содержатся в буквальном значении термина, определение не приведено, и соответственно, в графе "Определение" проставлен прочерк.
В стандарте приведен алфавитный указатель содержащихся в нем терминов на русском языке.
Стандартизованные термины набраны полужирным шрифтом, их краткая форма - светлым.
1. Полусвязанная система координат несущего винта
Прямоугольная система координат, начало которой размещается в точке пересечения оси вращения с плоскостью вращения несущего винта, имеющая нормальную ось (), связанную с осью вращения несущего винта, продольную () и поперечную () оси, направление которых определяется направлением проекции на плоскость вращения вектора воздушной скорости несущего винта
2. Продольная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная оси вращения несущего винта и имеющая такое же направление, как и проекция на плоскость вращения вектора воздушной скорости несущего винта
3. Нормальная ось полусвязанной системы координат несущего винта
Ось, совпадающая с осью вращения несущего винта и направленная в сторону положительного направления силы тяги.
Примечание. За положительное направление силы тяги принимается ее направление на режиме висения винтокрылого аппарата
4. Поперечная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная плоскости, образованной осями и , направленная в сторону наступающей лопасти.
Примечание. Так как ось направлена в сторону наступающей лопасти, то система полусвязанных осей координат оказывается правой для несущего винта правого вращения и левой для несущего винта левого вращения
5. Ось лопасти несущего винта
Прямая линия, относительно которой происходит изменение углового положения сечений лопасти при воздействии на нее исполнительного устройства системы управления несущего винта.
1. Для несущих винтов, у которых вертикальные шарниры имеют наибольшее удаление от оси вращения несущего винта по сравнению с другими шарнирами, за ось лопасти принимается прямая, относительно которой определяется геометрическая компоновка лопасти;
2. Здесь и далее все элементы конструкции винтокрылых летательных аппаратов принимаются недеформируемыми, за исключением специальных, применяемых на винтах с упругим креплением лопастей
6. Законцовка лопасти несущего винта
Наиболее удаленная от оси вращения часть лопасти несущего винта
7. Концевая точка лопасти несущего винта
Точка пересечения оси лопасти несущего винта с плоскостью, касательной к поверхности законцовки лопасти и перпендикулярной к ее оси
8. Плоскость вращения несущего винта
Плоскость, перпендикулярная оси вращения несущего винта, образуемая осью лопасти при вращении винта, когда угол взмаха лопасти () равен нулю.
Примечание. Для определения плоскости вращения винтов, имеющих конструктивный угол конусности, отличный от нуля, ось лопасти условно поворачивают до положения, перпендикулярного оси вращения винта
9. Ось вращения несущего винта
Геометрическая ось вала или опоры несущего винта, относительно которой происходит его вращение
10. Угол атаки несущего винта (в системе )
Угол между вектором воздушной скорости несущего винта и плоскостью его вращения; положителен, если проекция воздушной скорости на нормальную ось отрицательна
11. Угол взмаха лопасти несущего винта
Угол поворота оси лопасти относительно оси горизонтального шарнира или линии, ей эквивалентной, для упругой заделки лопасти, измеряемый от плоскости вращения несущего винта; положителен при отклонении оси лопасти в направлении положительной силы тяги
12. Угол качания лопасти несущего винта
Угол поворота оси лопасти относительно оси вертикального шарнира или линии ей эквивалентной для упругой заделки лопасти, измеряемый от плоскости, проходящей через ось вращения несущего винта и ось лопасти при 0; положителен при отклонении оси лопасти против направления вращения несущего винта
13. Угол азимутального положения лопасти несущего винта
Угол между отрицательной осью координат и осью лопасти несущего винта при 0; положителен при отклонении оси в направлении вращения винта
14. Радиус несущего винта
Радиус наибольшей окружности, лежащей в плоскости вращения несущего винта и образуемой концевой точкой лопасти.
1. За диаметр несущего винта принимается соответственно значение .
2. Радиус рулевого винта определяется аналогично и имеет обозначение .
3. Значение радиуса несущего винта используется при вычислении относительных линейных значений элементов несущего винта и винтокрылого летательного аппарата
15. Площадь несущего винта
Площадь, ометаемая лопастями несущего винта при его вращении при 0.
Примечание. Площадь несущего винта используется при вычислении относительных площадей элементов винтокрылого аппарата и различных безразмерных коэффициентов
16. Число лопастей несущего винта
17. Радиус сечения лопасти несущего винта
Расстояние от оси вращения несущего винта до сечения лопасти плоскостью, перпендикулярной оси лопасти при 0.
18. Хорда сечения лопасти несущего винта
Отрезок прямой, лежащий в плоскости, перпендикулярной к оси лопасти, и соединяющий наиболее удаленные точки сечения лопасти этой плоскостью.
Примечание. Для определения хорды произвольного сечения лопасти применяется буквенный или числовой индекс (например, - хорда лопасти в сечении на относительном радиусе 0,7)
19. Коэффициент заполнения несущего винта
Величина, определяемая соотношением
20. Расстояние от оси вращения несущего винта до оси горизонтального шарнира
Расстояние от оси вращения шарнирного несущего винта при 0 до оси горизонтального шарнира
21. Расстояние от оси вращения несущего винта до оси вертикального шарнира
Расстояние от оси вращения шарнирного несущего винта при 0 до оси вертикального шарнира
22. Расстояние между осями горизонтального и вертикального шарниров шарнирного несущего винта
23. Угол установки сечения лопасти несущего винта
Угол между хордой сечения лопасти и плоскостью вращения несущего винта при 0 и таком положении автомата перекоса несущего винта, при котором лопасть не меняет своего положения относительно плоскости вращения
24. Угол установки лопасти несущего винта
Угол установки сечения лопасти несущего винта при относительном радиусе 0,7.
25. Угол крутки сечения лопасти несущего винта
Разность между углом установки сечения лопасти и углом установки лопасти несущего винта
26. Статический момент лопасти несущего винта относительно горизонтального и вертикального шарниров
Статический момент лопасти
Статический момент лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира
27. Момент инерции лопасти несущего винта относительно горизонтального и вертикального шарниров
Момент инерции лопасти
Момент инерции массы лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира
28. Момент инерции несущего винта
Суммарный момент инерции массы лопастей и всех кинематически связанных с ним агрегатов, приведенный к оси вращения несущего винта.
Примечание. Кинематически связанные с несущим винтом агрегаты определяются в каждом конкретном случае
29. Массовая характеристика лопасти несущего винта
Величина, определяемая отношением
где - частная производная коэффициента аэродинамической подъемной силы профиля лопасти по углу атаки;
30. Воздушная скорость несущего винта
Скорость начала полусвязанной системы координат относительно невозмущенной среды
31. Угловая скорость вращения несущего винта
Угловая скорость вращения несущего винта вокруг его оси относительно фюзеляжа винтокрылого аппарата
32. Окружная скорость концов лопастей несущего винта
Средняя окружная скорость концевой точки лопасти несущего винта при вращении при 0.
Примечание. Среднюю окружную скорость рулевого винта обозначают
33. Характеристика режима работы несущего винта
Характеристика режима винта
Величина, определяемая соотношением
Примечания к терминам 1-33:
1. Определения терминов пп.1-33 применимы и для рулевого винта с обязательным использованием тех же буквенных обозначений с индексом "р", за исключением п.14.
2. Аналогично образуются термины, определения и буквенные обозначения для несущих винтов многовинтовых винтокрылых аппаратов, но обозначения должны иметь различающиеся для различных винтов индексы.
3. Индексы "н" и "р" могут быть опущены, если это не приведет к смешиванию понятий
34. Аэродинамическая сила несущего винта
Равнодействующая системы аэродинамических сил, действующих на несущий винт
35. Продольная сила несущего винта
Составляющая силы по оси полусвязанной системы координат несущего винта, взятая с обратным знаком
36. Сила тяги несущего винта
Составляющая силы по оси полусвязанной системы координат несущего винта
37. Боковая сила несущего винта
Составляющая силы по оси полусвязанной системы координат несущего винта
38. Аэродинамический момент несущего винта
Момент системы сил, образующих аэродинамическую силу , относительно точки пересечения плоскости вращения несущего винта с осью его вращения
39. Поперечный момент несущего винта
Составляющая момента по оси полусвязанной системы координат несущего винта
40. Нормальный момент несущего винта
Составляющая аэродинамического момента по оси полусвязанной системы координат несущего винта
41. Продольный момент несущего винта
Составляющая аэродинамического момента по оси полусвязанной системы координат несущего винта
42. Крутящий момент несущего винта
Составляющая аэродинамического момента по оси полусвязанной системы координат несущего винта, взятая с обратным знаком
43. Коэффициенты составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат
Отношение составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамической силы по осям связанной и скоростной систем координат, определяемые отношением силы к произведению , имеют аналогичные принятым в ГОСТ 20058-74* обозначения со специальными индексами, например, и и т.п.
* На территории Российской Федерации действует ГОСТ 20058-80. Здесь и далее. - Примечание изготовителя базы данных.
44. Коэффициенты составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат
Отношение составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамического момента по осям связанной и скоростной систем координат, определяемые отношением момента к произведению , имеют аналогичные принятым в ГОСТ 20058-74 обозначения со специальными индексами. Например, , и т.п.

государственный стандарт
союза сср
АППАРАТЫ ВИНТОКРЫЛЫЕ.
МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ
ТЕРМИНЫ, ОПРЕДЕЛЕНИЯ И БУКВЕННЫЕ ОБОЗНАЧЕНИЯ
ГОСТ 22499-77
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СТАНДАРТОВ
СОВЕТА МИНИСТРОВ СССР
Москва
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
АППАРАТЫ ВИНТОКРЫЛЫЕ. МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ
Термины, определения и буквенные обозначения
Rotorcraft. Flight mechanics.
Terms, definitions and letter symbols
ГОСТ
22499-77
Постановлением Государственного комитета стандартов Совета Министров СССР от 29.04.1977 г. № 1108 срок введения установлен
с 01.07.1978 г.
Настоящий стандарт устанавливает применяемые в науке, технике и производстве термины, определения и буквенные обозначения величин основных понятий, относящихся к механике полета в атмосфере винтокрылых аппаратов.
Термины и буквенные обозначения, установленные настоящим стандартом, обязательны для применения в документации всех видов, учебниках, учебных пособиях, технической и справочной литературе.
Приведенные определения можно, при необходимости, изменять по форме изложения, не допуская нарушения границ понятий.
Для каждого понятия установлен один стандартизованный термин. Применение терминов-синонимов стандартизованного термина запрещается.
Для отдельных стандартизованных терминов в стандарте приведены их краткие формы, которые разрешается применять в случаях, исключающих возможность их различного толкования.
В случае, когда существенные признаки понятия содержатся в буквальном значении термина, определение не приведено, и соответственно, в графе «Определение» проставлен прочерк.
В стандарте приведен алфавитный указатель содержащихся в нем терминов на русском языке.
Стандартизованные термины набраны полужирным шрифтом, их краткая форма - светлым.
1. Полусвязанная система координат несущего винта
Прямоугольная система координат, начало Oн которой размещается в точке пересечения оси вращения с плоскостью вращения несущего винта, имеющая нормальную ось (OнYн), связанную с осью вращения несущего винта, продольную (ОнХн) и поперечную (OнZн) оси, направление которых определяется направлением проекции на плоскость вращения вектора воздушной скорости несущего винта
2. Продольная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная оси вращения несущего винта и имеющая такое же направление, как и проекция на плоскость вращения вектора воздушной скорости несущего винта
Ось, совпадающая с осью вращения несущего винта и направленная в сторону положительного направления силы тяги.
Примечание. За положительное направление силы тяги принимается ее направление на режиме висения винтокрылого аппарата
4. Поперечная ось полусвязанной системы координат несущего винта
Ось, перпендикулярная плоскости, образованной осями ОнХн и OнYн, направленная в сторону наступающей лопасти.
Примечание . Так как ось OнZн направлена в сторону наступающей лопасти, то система полусвязанных осей координат оказывается правой для несущего винта правого вращения и левой для несущего винта левого вращения
Прямая линия, относительно которой происходит изменение углового положения сечений лопасти при воздействии на нее исполнительного устройства системы управления несущего винта.
Примечания: 1. Для несущих винтов, у которых вертикальные шарниры имеют наибольшее удаление от оси вращения несущего винта по сравнению с другими шарнирами, за ось лопасти принимается прямая, относительно которой определяется геометрическая компоновка лопасти;
2. Здесь и далее все элементы конструкции винтокрылых летательных аппаратов принимаются недеформируемыми, за исключением специальных, применяемых на винтах с упругим креплением лопастей
6. Законцовка лопасти несущего винта
Наиболее удаленная от оси вращения часть лопасти несущего винта
7. Концевая точка допасти несущего винта
Точка пересечения оси лопасти несущего винта с плоскостью, касательной к поверхности законцовки лопасти и перпендикулярной к ее оси
Примечание. Для определения плоскости вращения винтов, имеющих конструктивный угол конусности, отличный от нуля, ось лопасти условно поворачивают до положения, перпендикулярного оси вращения винта
Геометрическая ось вала или опоры несущего винта, относительно которой происходит его вращение
Угол между вектором воздушной скорости несущего винта и плоскостью его вращения; положителен, если проекция воздушной скорости на нормальную ось отрицательна
11. Угол взмаха лопасти несущего винта
Угол поворота оси лопасти относительно оси горизонтального шарнира или линии, ей эквивалентной, для упругой заделки лопасти, измеряемый от плоскости вращения несущего винта; положителен при отклонении оси лопасти в направлении положительной силы тяги
12. Угол качания лопасти несущего винта
13. Угол азимутального положения лопасти несущего винта
14. Радиус несущего винта
Радиус наибольшей окружности, лежащей в плоскости вращения несущего винта и образуемой концевой точкой лопасти.
1. За диаметр несущего винта принимается соответственно значение D = 2R.
2. Радиус рулевого винта определяется аналогично и имеет обозначение Rр.в.
3. Значение радиуса несущего винта используется при вычислении относительных линейных значений элементов несущего винта и винтокрылого летательного аппарата
15. Площадь несущего винта
Примечание. Площадь несущего винта используется при вычислении относительных площадей элементов винтокрылого аппарата и различных безразмерных коэффициентов
17. Радиус сечения лопасти несущего винта
Отрезок прямой, лежащий в плоскости, перпендикулярной к оси лопасти, и соединяющий наиболее удаленные точки сечения лопасти этой плоскостью.
Примечание . Для определения хорды произвольного сечения лопасти применяется буквенный или числовой индекс (например, b0,7 - хорда лопасти в сечении на относительном радиусе )
Величина, определяемая соотношением
21. Расстояние от оси вращения несущего винта до оси вертикального шарнира
22. Расстояние между осями горизонтального и вертикального шарниров шарнирного несущего винта
23. Угол установки сечения лопасти несущего винта
24. Угол установки лопасти несущего винта
Угол установки сечения лопасти несущего винта при относительном радиусе
25. Угол крутки сечения лопасти несущего винта
Разность между углом установки сечения лопасти и углом установки лопасти несущего винта
26. Статический момент лопасти несущего винта относительно горизонтального и вертикального шарниров
Статический момент лопасти
Статический момент лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира.
Момент инерции лопасти
Момент инерции массы лопасти несущего винта и других агрегатов, совершающих вместе с лопастью маховое движение:
относительно горизонтального шарнира;
относительно вертикального шарнира.
28. Момент инерции несущего винта
Суммарный момент инерции массы лопастей и всех кинематически связанных с ним агрегатов, приведенный к оси вращения несущего винта.
Примечание. Кинематически связанные с несущим винтом агрегаты определяются в каждом конкретном случае
29. Массовая характеристика лопасти несущего винта
Величина, определяемая отношением
где - частная производная коэффициента аэродинамической подъемной силы профиля лопасти по углу атаки;
30. Воздушная скорость несущего винта
Скорость начала Он полусвязанной системы координат относительно невозмущенной среды
31. Угловая скорость вращения несущего винта
Угловая скорость вращения несущего винта вокруг его оси относительно фюзеляжа винтокрылого аппарата
32. Окружная скорость концов лопастей несущего винта
33. Характеристика режима работы несущего винта
Характеристика режима винта
Величина, определяемая соотношением
Примечания к терминам 1 - 33:
1. Определения терминов пп. 1 - 33 применимы и для рулевого винта с обязательным использованием тех же буквенных обозначений с индексом «р», за исключением п. 14.
2. Аналогично образуются термины, определения и буквенные обозначения для несущих винтов многовинтовых винтокрылых аппаратов, но обозначения должны иметь различающиеся для различных винтов индексы.
3. Индексы «н» и «р» могут быть опущены, если это не приведет к смешиванию понятий
34. Аэродинамическая сила несущего винта
Равнодействующая системы аэродинамических сил, действующих на несущий винт
35. Продольная сила несущего винта
Составляющая силы по оси ОнХн полусвязанной системы координат несущего винта, взятая с обратным знаком
Составляющая силы по оси ОнYн полусвязанной системы координат несущего винта
Составляющая силы по оси OнZн полусвязанной системы координат несущего винта
Момент системы сил, образующих аэродинамическую силу , относительно точки пересечения плоскости вращения несущего винта с осью его вращения
39. Поперечный момент несущего винта
Составляющая момента Мн по оси ОнХн полусвязанной системы координат несущего винта
Составляющая аэродинамического момента Мн по оси ОнYн полусвязанной системы координат несущего винта
41. Продольный момент несущего винта
Составляющая аэродинамического момента Мн по оси ОнZн полусвязанной системы координат несущего винта
42. Крутящий момент несущего винта
Составляющая аэродинамического момента Мн по оси ОнYн полусвязанной системы координат несущего винта, взятая с обратным знаком
Отношение составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамической силы по осям связанной и скоростной систем координат, определяемые отношением силы к произведению , имеют аналогичные принятым в ГОСТ 20058-74 обозначения со специальными индексами, например, т.п.
44. Коэффициенты составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат
Отношение составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат к произведению .
Примечание. Коэффициенты составляющих аэродинамического момента по осям связанной и скоростной систем координат, определяемые отношением момента к произведению , имеют аналогичные принятым в ГОСТ 20058-74 обозначения со специальными индексами. Например, , и т.п.
АЛФАВИТНЫЙ УКАЗАТЕЛЬ ТЕРМИНОВ
Законцовка лопасти несущего винта
Коэффициент заполнения несущего винта
Коэффициенты составляющих аэродинамического момента несущего винта по осям полусвязанной системы координат
Коэффициенты составляющих аэродинамической силы несущего винта по осям полусвязанной системы координат
Момент инерции несущего винта
Момент инерции лопасти
Момент инерции лопасти несущего винта относительно горизонтального и вертикального шарниров
Момент лопасти несущего винта относительно горизонтального и вертикального шарниров статический
Диаметр несущего винта (Д=15,9 м) —диаметр окружности, описываемой концами лопастей при их вращении.
Площадь, ометаемая несущим винтом
= 198 м’. Для вертолетов соосной схемы с равными диаметрами несущих винтов за ометасмую площадь принимается площадь, ометаемая одним несущим винтом.
Количество лопастей (k = 6). У соосных винтов в расчетах оперируют суммарным количеством лопастей обоих винтов.
Коэффициент заполнения о = —- я= (),0<) — отношс-
Удельная нагрузка на ометасмую площадь определяется как отношение массы вертолета к площади, омстаемой
несущим винтом (р= ——— кгс/м^). Этот параметр влияет на
Геометрическая крутка лопасти — разность между установочными углами у корня и у конца лопасти. Эта разность на любом шаге винта остается постоянной. Крутка необходима для выравнивания аэродинамических сил по размаху лопасти, так как вследствие разности окружных скоростей у корня и у конца лопасть по длине обдувается воздушным потоком под разными углами атаки.
Если несущий винт разрезать двумя цилиндрическими поверхностями, радиусы которых отличаются один от другого на бесконечно малую величину Дг = Г2— г4 (рис. 1.3)’,

Рис. 1.3. Элемент лопасти
то получим элемент лопасти с малой длиной А г, такой, что основные параметры, характеризующие условия работы лопасти по длине этого элемента, можно считать постоянными. Такими параметрами являются:
Профиль лопасти (рис. 1.4) —МЛСА-230, двояковыпуклый, несимметричный, с относительной толщиной в сечениях:
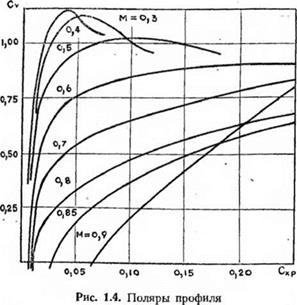
от г = 0,13 до г = 0,3, с=14,5%;
от г=0,4 до г= 1,0, с— 12%.
Основные аэродинамические характеристики этого профиля:
— угол атаки нулевой подъемной силы (су — 0) <*о = •—1,3°;
— критический угол атаки (Сумакс = М) аКр=18°;
— наивыгоднейший угол атаки (/Смакс=60) а1Ш = 4—7°.
Благодаря высокому аэродинамическому качеству профиля, которое незначительно изменяется в большом диапазоне углов атаки, обеспечивается хороший переход лопасти па режим самовращения при отказе двигателей.
Угол установки элемента лопасти <ре (рис. 1.5)—угол, заключенный между хордой профиля (Ь) и плоскостью вращения.
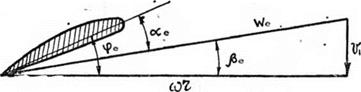
Рис. 1.5. Треугольник скоростей апемента лопасти
Угол атаки элемента лопасти ае — угол, заключенный между хордой профиля и вектором суммарной скорости потока (И7е).
Угол притекания потока ре — угол, заключенный между векторами суммарной и окружной скоростей набегающего па элемент потока.
Поскольку все лопасти винтов имеют геометрическую крутку, понятие «угол установки лопасти» становится неопределенным. Поэтому условно углом установки лопасти, а значит и винта, считают угол установки сечений на относительном радиусе г=0,7.
Скорость обтекания We является векторной суммой окружной скорости (сол) и индуктивной скорости подсасывания (щ):
При наборе высоты или снижении к указанным векторам скоростей добавляется вектор вертикальной скорости
(I/y), а при поступательном полете еще и вектор скорости
взмаха лопасти (УВэм), что приводит к изменению угла атаки сечения.
Угол азимутального положения лопасти ij) (рис. 1.6) — угол, заключенный между продольной осью лопасти в данный момент и продольной осью лопасти, когда она находится в нулевом положении. За нулевое принято считать положение, когда продольная ось лопасти направлена в сторону, противоположную полету. Отсчет угла производится в сторону вращения несущего винта.
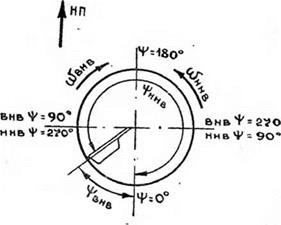
Рис. 1.6. Азимутальное положение лопастей ВНВ и ННВ
Угол азимутального положения служит для определения положения лопасти относительно направления полета вертолета.
Угол атаки несущего винта Л — угол, заключенный меж-
ду вектором скорости воздушного потока (Увп), набегающего на винт, и плоскостью вращения НВ (рис. 1.7).
Если воздушный поток набегает на плоскость вращения НВ снизу, угол атаки винта положительный, если сверху — отрицательный. В зависимости от направления полета вертолета угол атаки НВ может меняться от 0 до ±180°.
Читайте также: